Creating an Obstacle Sensor for Robotic Tasks
Student research project by Max Schaufelberger
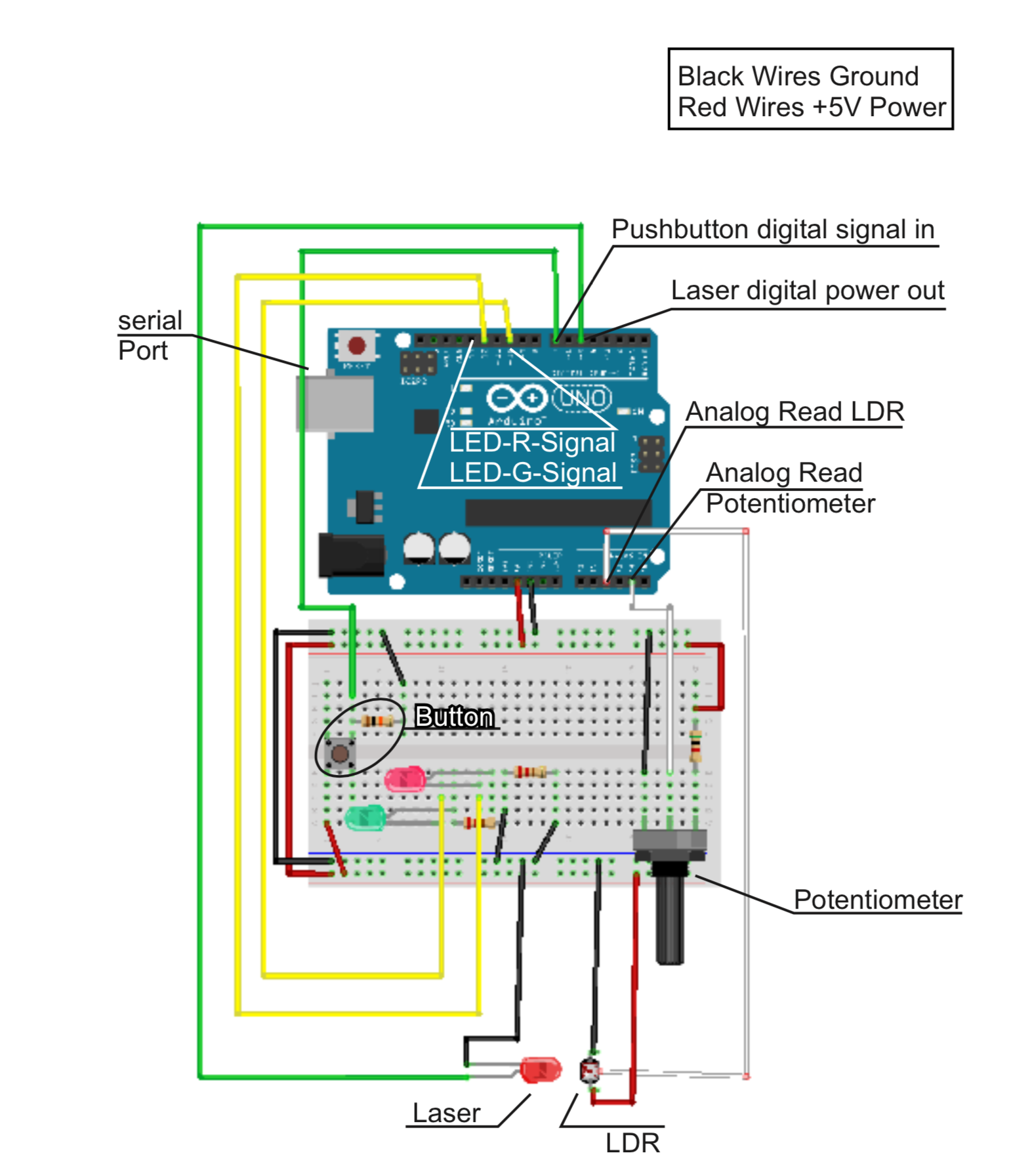
This research project documents the construction of a laser barrier as an object sensor for easy implementation in generic pick-and place robotic procedures
The main goal is to design an inexpensive plug-and-play object sensor for generic gripping and placing robots. The aim is that after reading this paper everyone can build this sensor on a laser barrier. The focus of this work is the communication between an Arduino and a computer.
One possible area of application is 20.000 Blocks project, where our robot Ginger — a UR10 robot arm — recreates buildings designed by Minecraft players as models.
Supervised by Anton Savov, Alexander Stefas