Assembly with Robots
Student research by Rui Nong
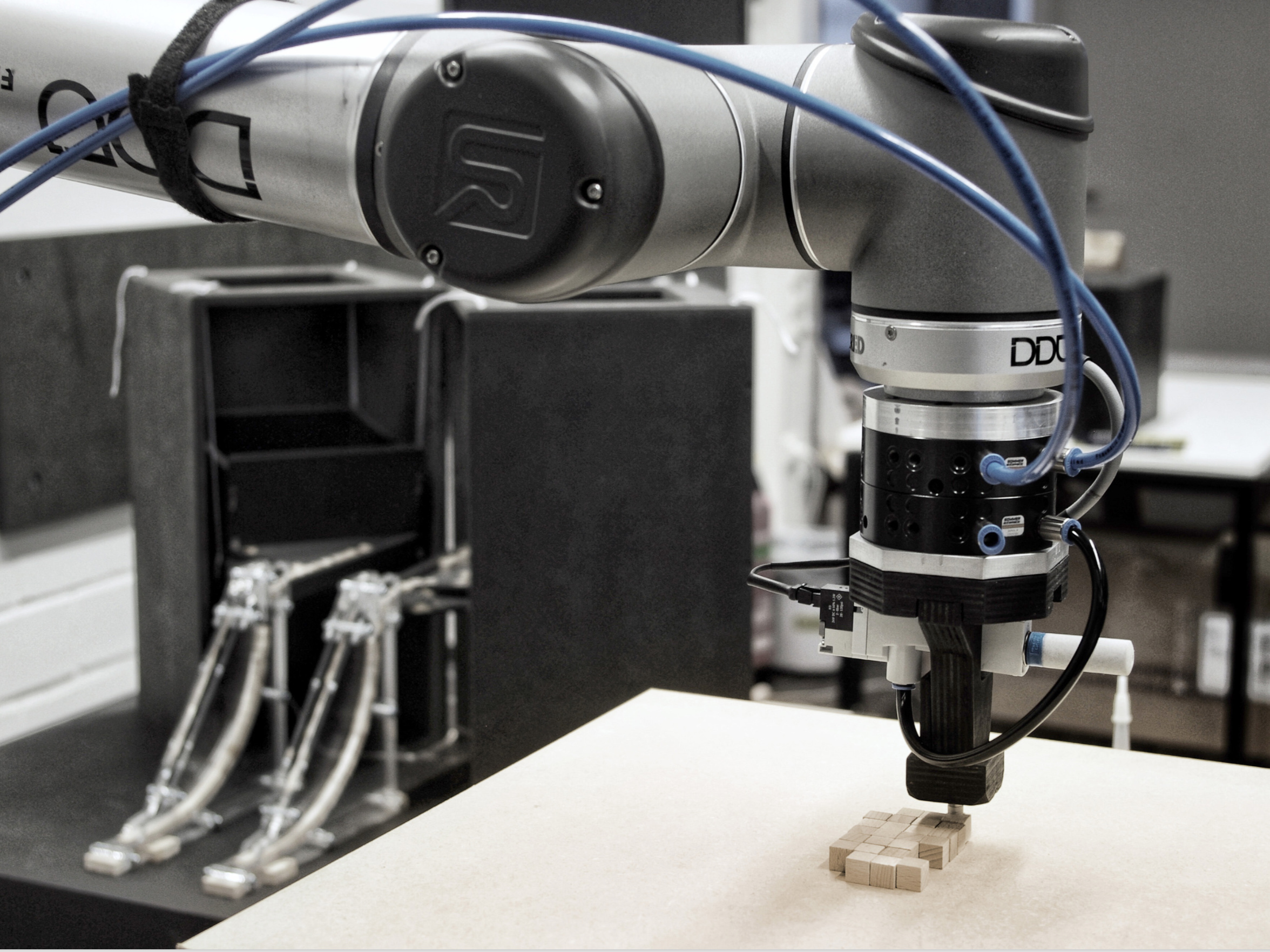
This research and development project is based on the robotic assembly part of the ongoing research project 20000blocks. The goal of this project is to speed up the construction time for new models and lies in two aspects: improving the design of material dispenser and enhancing the robot code efficiency. The current setup includes a computer, a UR10 robot with suction gripper, two material dispensers, a gluing station, a placing platform, and other electronic parts.
Supervised by Anton Savov
Special thanks to: Andrea Rossi,Alexander Stefas, Steffen Bisswanger, Theo Gruner, Wei Sun, Max Schaufelberger