Unsere Gesellschaft steht vor der globalen Herausforderung, die enormen notwendigen Bautätigkeiten der kommenden Jahrzehnte mit einer Industrie zu bewältigen, deren Produktivitätszuwächse gering sind und die unter einem Fachkräftemangel leidet. Gleichzeitig sind Innovationen notwendig, die eine drastische Reduzierung der CO2-Emissionen und des Abfallaufkommens im Bauwesen ermöglichen.
Ein wichtiger Baustein zur Meisterung dieser Herausforderung ist die enge Verknüpfung der gesamten Prozesskette vom Entwerfen, über das Materialisieren und Vorfertigung bis Bauteilmontage mit Hilfe von Künstlicher Intelligenz, Sensorik und Automatisierung. Dieses Projekt widmet sich dem letzten Arbeitsschritt der Bauteilmontage durch autonom agierende Roboter.
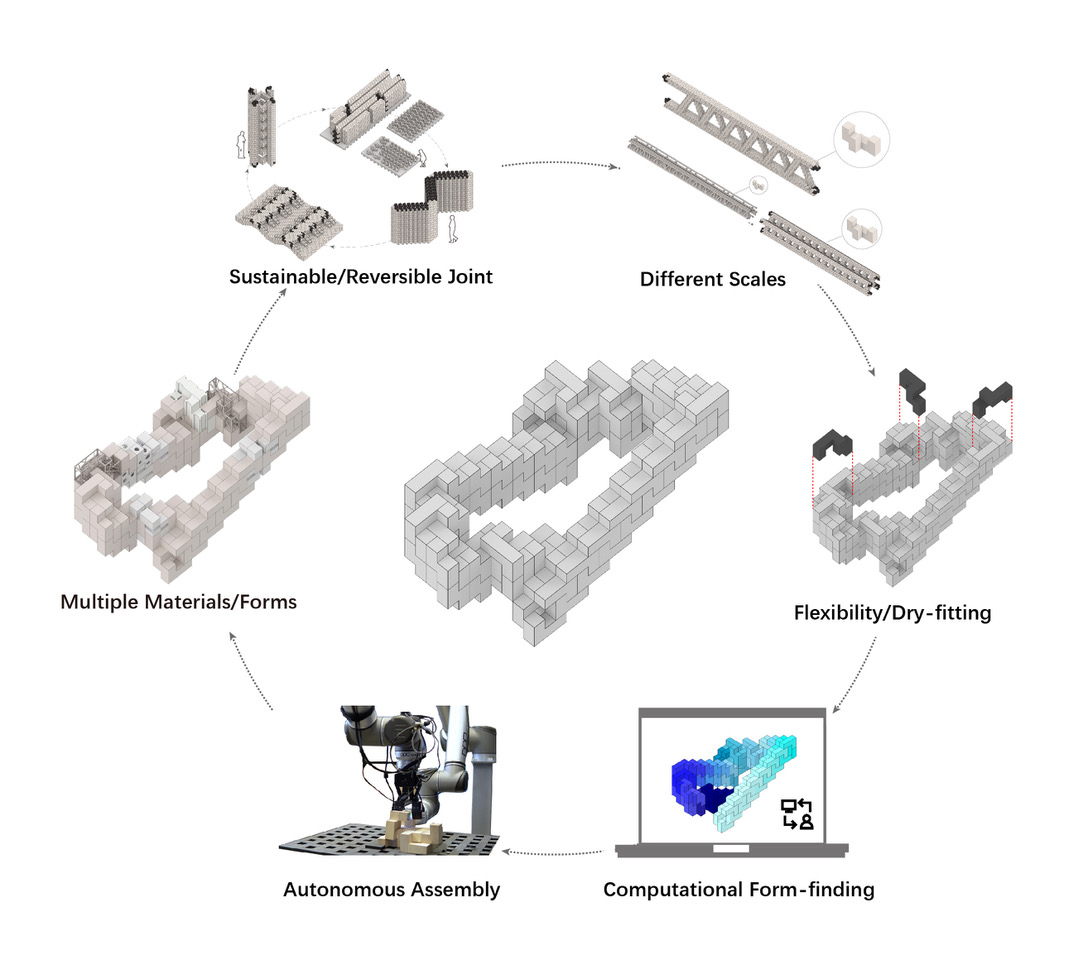
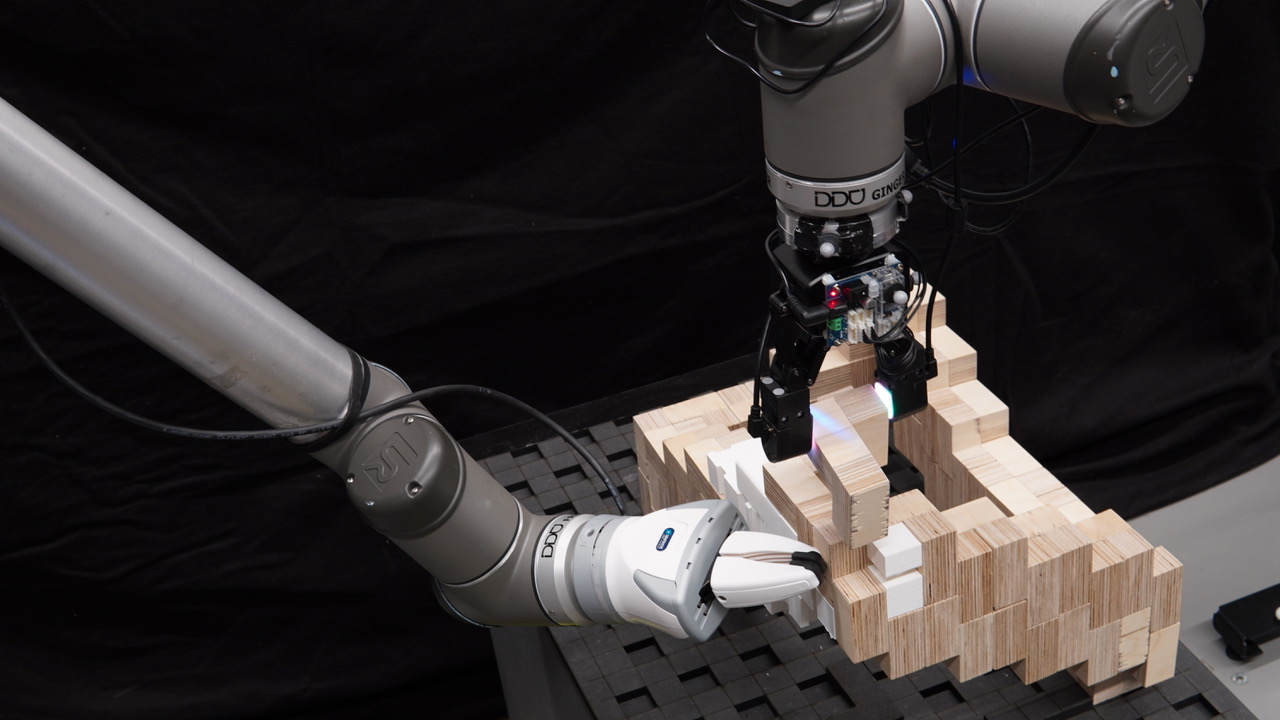
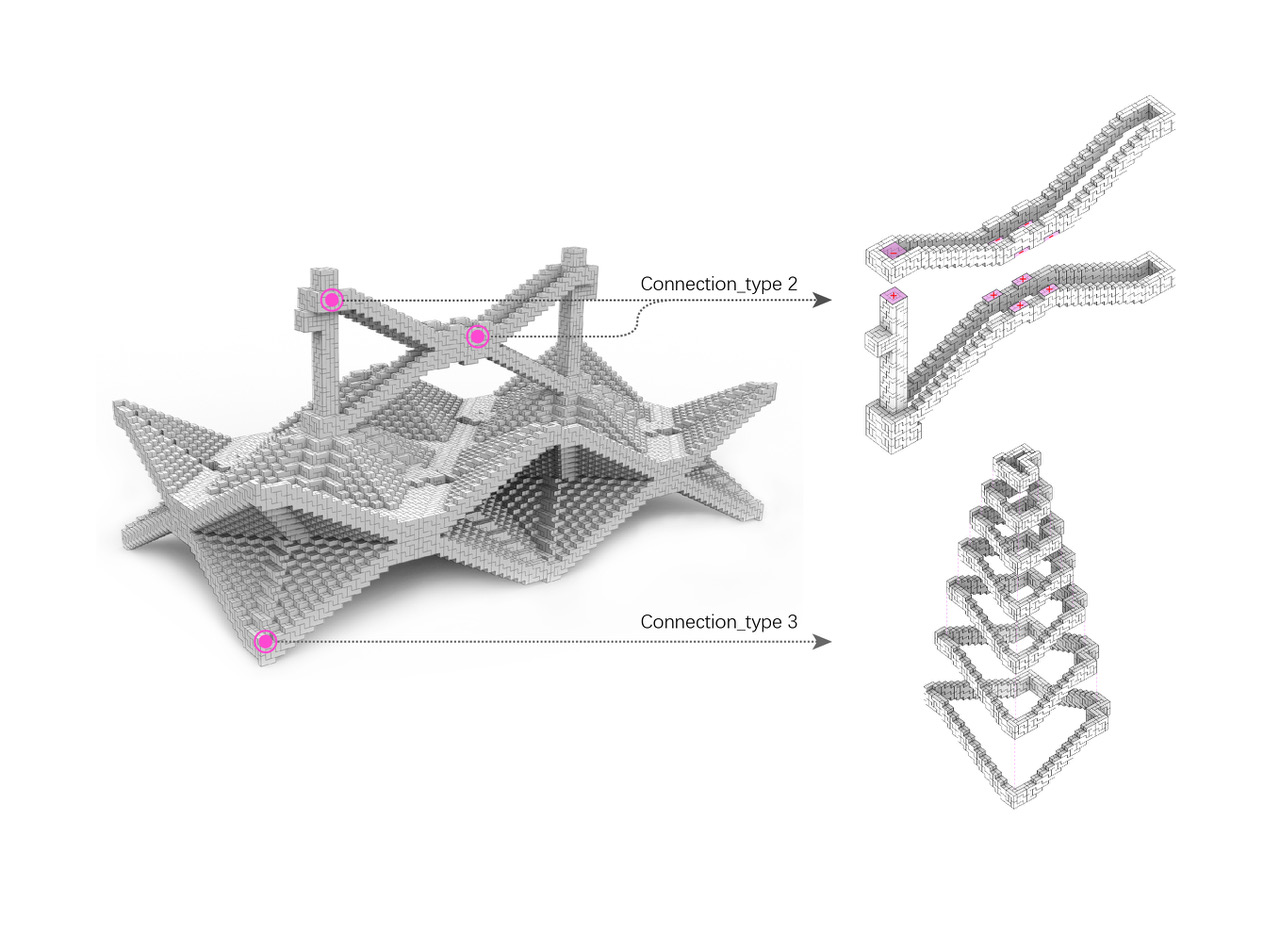
Konkret werden prototypisch modulare Bausysteme aus seriell, industriell und wirtschaftlich hergestellten Elementen entwickelt und durch autonome Roboter gefügt. Zunächst entwickelt das interdisziplinäre Team Elemente, die trocken und reversibel durch Roboter zu verzahnten Konstruktionen gefügt, demontiert und in anderer Form re-montiert werden können. Dazu werden Fügeprinzipien des Holz- und Stahlbaus auf ihre Übertragbarkeit auf andere Materialien unter Berücksichtigung der gewünschten Kraftübertragung untersucht, um Material- und Funktionsdifferenzierung (Tragen, Feuchtigkeit regulieren, Licht lenken etc.) von Elementen innerhalb einer Konstruktion zu ermöglichen. Zusätzlich sollen die Elemente im Sinne des „Robot-Oriented_Design“ für die robotergestützte Montage optimiert werden. Die daraus erstellten Konstruktionen sollen im Sinne der Kreislaufwirtschaft reversibel gefügt und durch Roboter demontierbar sein. Das vollständige sequentielle Zusammenfügen zu einer Struktur (Demonstrator) inklusive aller Montageschritte erfolgt auf der Grundlage einer abstrakten Beschreibung (3D-Modell). Roboter bestimmen dabei ihre Bewegungsabläufe selber und “begreifen” Gewicht, Dimension und Oberflächeneigenschaften von Bauteilen durch visuotaktile Sensorik. Maschinelles Lernen und Sensorik helfen dabei, Bauaufgaben, die derzeit aufgrund ihrer Komplexität nicht vorab zu programmieren sind oder eine permanente Anpassungsfähigkeit des Systems erfordern, autonom durchzuführen. Im Projekt wird untersucht wie architektonisch/konstruktive Aspekte für das verstärkende maschinelle Lernen (Reinforcement Learning) als Belohnungen (Rewards) repräsentiert werden können. Stabile Konstruktionen werden beim verstärkenden Lernen belohnt (positive rewards). Herabfallende Elemente führten zu Bestrafungen (negative rewards), so soll der Roboter über KI und Reinforcement Learning ein Verständnis für Konstruktion und stabile Bauzustände entwickeln. Außerdem werden algorithmische Entwurfswerkzeuge für elementierte Konstruktionen entwickelt, mit denen die neu gewonnenen gestalterisch/konstruktiven Möglichkeiten autonom bauender Roboter vollumfänglich ausgeschöpft werden können. Die im Projekt gewonnen Erkenntnisse werden anhand von Prototypen und Demonstrator-Konstruktionen exemplarisch angewendet und evaluiert. Letztlich soll der Erkenntnisgewinn zur Nutzung architektonisch/konstruktiver Kriterien in Prozessen des maschinellen Lernens so verallgemeinert werden, dass er für vielfältige Anwendungen des Entwerfens und Bauens nutzbar wird und Architekturschaffende ein vertieftes Verständnis für maschinelles Lernen im Bauen entwickeln. Moderne Sensorik erlaubt den Einsatz solcher Roboter auch ohne Abschirmung von Menschen. Automatisierung kann so schrittweise und sozialverträglich erfolgen und in einer extrem kleinteiligen Industrie angemessen implementiert werden.
FORSCHUNGSINSTITUTION
Technische Universität Darmstadt
Digital Design Unit (DDU)
Intelligent Autonomous Systems Group (IAS)
PROJEKTLEITUNG
Prof. Dr.-Ing. Oliver Tessmann
Prof. Jan Peters, PhD
TEAM
Boris Belusov, IAS
Mehrzad Esmaeili, DDU
Yuxi Liu, DDU
Yvonne Machleid, DDU
LINKS
Intelligent Autonomous Systems (IAS)
FÖRDERGEBER
Dieses Projekt wird gefördert vom Bundesinstitut für Bau-, Stadt- und Raumforschung im Auftrag des Bundesamts für Bauwesen und Raumordnung (BBR) aus Mitteln der Zukunft Bau Forschungsförderung